The Project
-

Universal Haptic Pantograph (UHP) rehabilittaion robot
-

Universal Haptic Pantograph (UHP) rehabilittaion robot
-
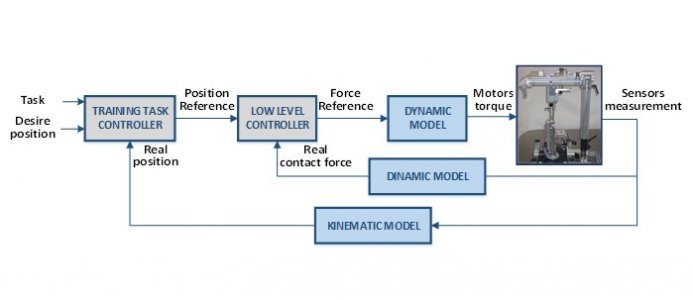
Control of UHP rehabilittaion robot
Universal Haptic Pantograph (UHP) rehabilittaion robot
Universal Haptic Pantograph (UHP) rehabilittaion robot
Control of UHP rehabilittaion robot