The Project
-
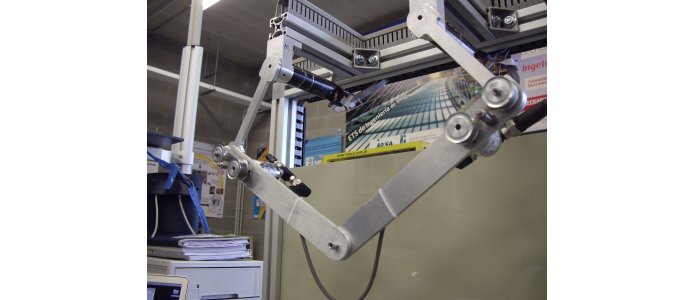
Prototype 5R with sensors in passive articulations
-
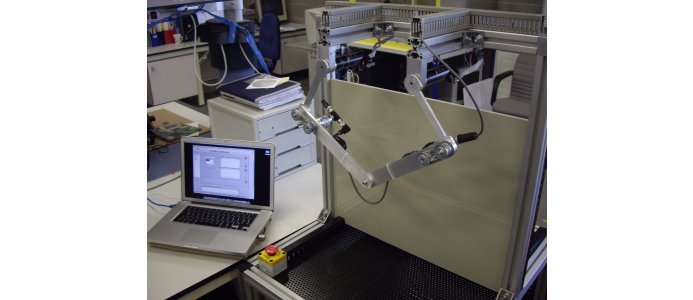
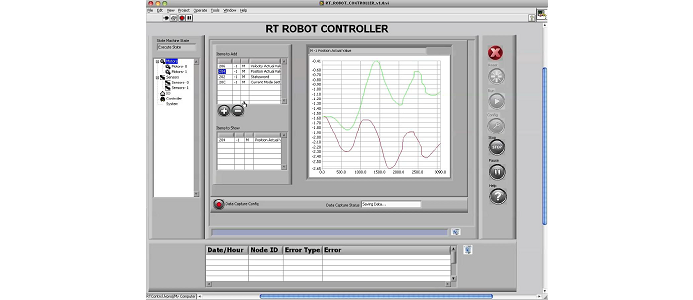
Host-target arquitecture in the 5R implementation
-
ValidBot
-

Controllers of linear motors
-

Linear motor