The Project
-
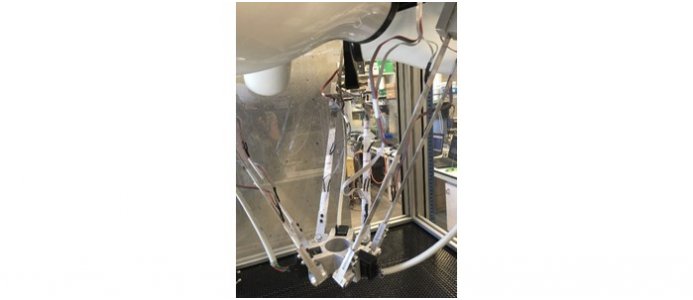
Real flexible Delta Robot prototype
-
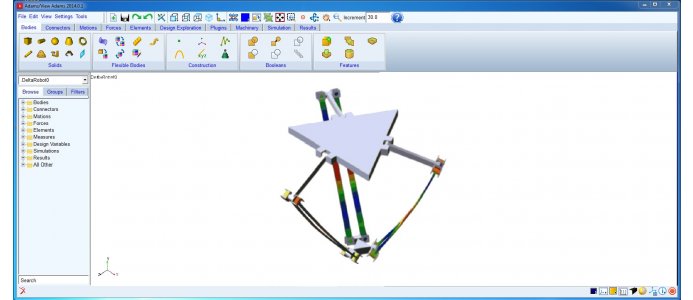
Dynamic simulation of a Delta Robot with Flexible links
-

Mechanical design prototype 3PRS
-
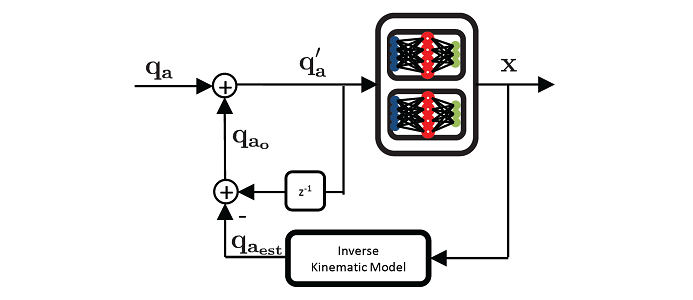
Reduced kinematic modelling
-

Implementation framework