

QoS_DREAMS - QoS-Driven REconfigurAtion of distributed systeMS (QoS_DREAMS - DPI2012-37806-C02-01)
- Lead researcher: Marga Marcos - (01/01/2013 - 31/12/2015)
- Funding body: Spanish Ministry of Economy and Competitiviness
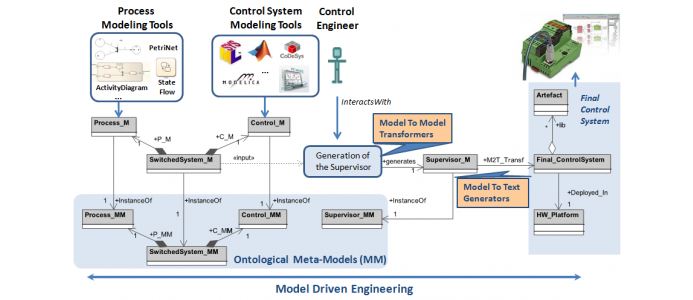
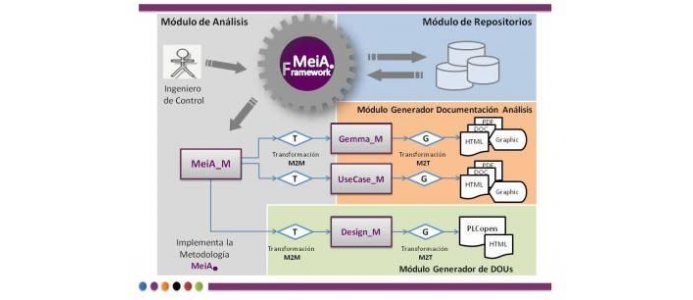
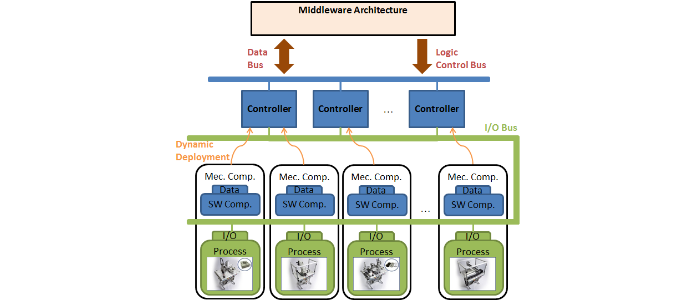
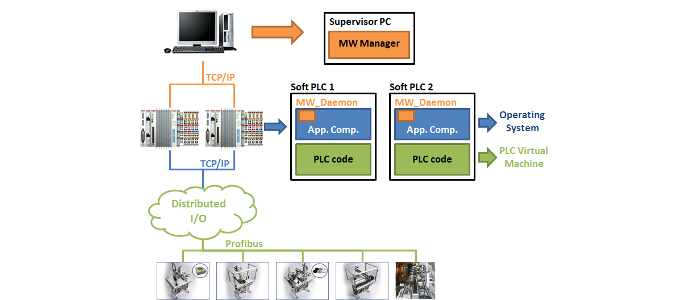
The general aim of this project is to analyse the viability of the application of domain modelling techniques and components technologies to design and develop complex, distributed and reconfigurable applications. We will partilarly focus on the dynamic reconfiguration of applications in two different areas: distributed automatisation applications and distributed embedded applications. Thus, one of the aims of this project is to analyse the use of multi-view modelling techniques both for designing (specification) and...
Read more