Modelling distributed control systems based on XML to integrate COT tools (DPI2003-02399)
- Lead researcher: Marga Marcos - (01/12/2003 - 30/12/2006)
- Funding body: Spanish Ministry of Science and Innovation
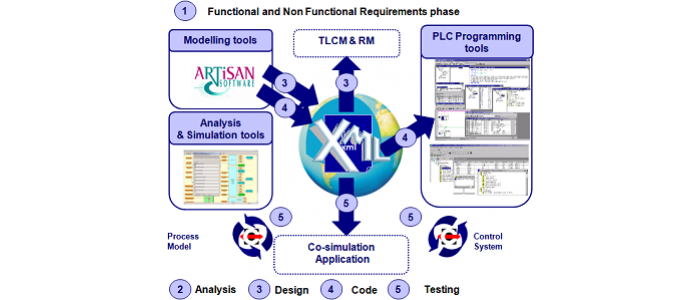
The aim of this project is to develop methodologies and tools to design and develop distributed control systems (DCS) with a high degree of flexibility, reliability, and reuse of developed applications. The great progress that has occurred in recent years, both for hardware systems specific to control (PLCs, industrial computers, industrial fieldbuses, controllers, etc.) and for multidisciplinary COTS tools (Commercial-Off-The-Shelf) (code analysis, simulation and generation in different areas of knowledge) offers great...
Read more